


Podział i opis robotów

Klasyfikacja robotów ze względu na ich budowę i funkcjonalność.
Roboty można klasyfikować na wiele sposobów, w zależności od ich budowy i funkcjonalności. Oto kilka podstawowych kategorii:
Podział robotów ze względu na budowę:
Roboty przemysłowe: Są to maszyny zaprojektowane do wykonywania zadań w środowiskach przemysłowych. Często mają formę mechanicznego ramienia. Takie roboty wykorzystuje się do zadań takich jak montaż, malowanie, pakowanie, czy spawanie.
Roboty mobilne: Są to roboty zdolne do ruchu w swoim środowisku. Mogą one poruszać się na kołach, gąsienicach, nogach lub nawet latać lub pływać. Przykładem takich robotów są roboty marsjańskie NASA, drony, roboty odkurzające, czy roboty asystujące.
Roboty humanoidalne: Są to roboty zaprojektowane do naśladowania wyglądu
i zachowań człowieka. Często mają dwie ręce, dwie nogi i głowę. Niektóre z nich są nawet zdolne do wykonywania złożonych zadań, takich jak chodzenie czy mówienie.
Roboty zwierzęce: Są to roboty, które naśladują zwierzęta, zarówno w wyglądzie, jak i zachowaniu. Przykładem może być Boston Dynamics’ Spot, który naśladuje ruchy psa.
Nanoroboty: Są to mikroskopijne roboty zaprojektowane do pracy na bardzo małych skalach, często na poziomie cząsteczek.
Podział robotów ze względu na funkcjonalność:
Roboty manualne: Są to roboty, które wymagają ciągłego sterowania przez operatora.
Roboty półautonomiczne: Są to roboty, które mogą wykonywać niektóre zadania samodzielnie, ale wymagają nadzoru lub interwencji człowieka.
Roboty autonomiczne: Są to roboty, które mogą działać samodzielnie bez ciągłego nadzoru człowieka. Mają zdolność do percepcji swojego środowiska, planowania działań i podejmowania decyzji.
Roboty adaptacyjne: Są to roboty, które mogą uczyć się i dostosowywać swoje działania w oparciu o doświadczenie.
Roboty interaktywne: Są to roboty zaprojektowane do interakcji z ludźmi, często wykorzystywane w usługach, edukacji lub opiece.
Warto pamiętać o tym, że te kategorie często się nakładają – na przykład, robot humanoidalny może być równocześnie robotem autonomicznym i interaktywnym.
Klasyfikacja robotów ze względu na budowę jednostki kinematycznej.
Roboty różnią się pod względem budowy ich jednostek kinematycznych. To, jak jest zbudowany robot, często determinuje jego zdolność do wykonywania pewnych zadań. Oto kilka podstawowych rodzajów jednostek kinematycznych:
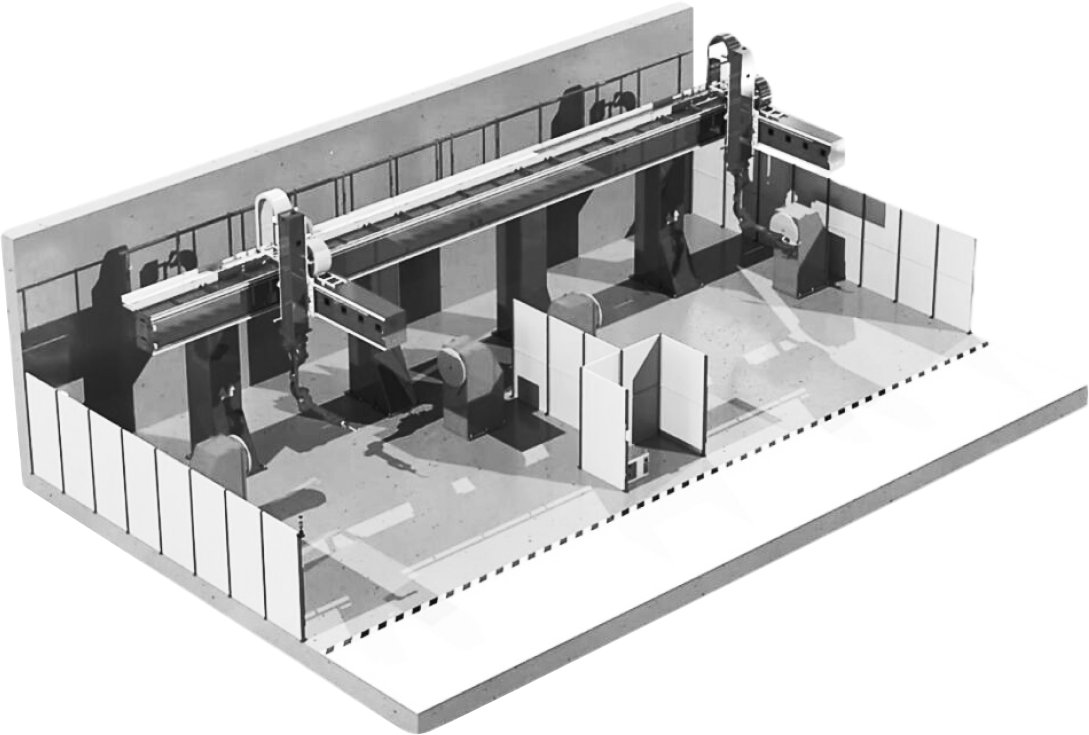
Roboty kartezjańskie (przestrzenne): Są to roboty, które poruszają się wzdłuż trzech osi (X, Y i Z) układu współrzędnych kartezjańskich. Ruchy są kontrolowane za pomocą trzech pionowych i poziomych przesunięć. Są proste w konstrukcji i łatwe do programowania. Zazwyczaj są wykorzystywane w przemyśle, na przykład w obróbce CNC, montażu, czy w drukarkach 3D.
Roboty cylindryczne: Mają ramie, które obraca się wokół pionowej osi, oraz wysięgnik, który porusza się pionowo w górę i w dół oraz w przód i w tył, tworząc strukturę podobną do cylindra. Są często wykorzystywane w zastosowaniach takich jak montaż, spawanie czy pakowanie.
Roboty sferyczne (polarne): Mają ramie, które obraca się wokół pionowej osi,
a wysięgnik porusza się wzdłuż promienia tworząc strukturę przypominającą sferę. Takie roboty wykorzystuje się na przykład przy montażu, spawaniu, czy obróbce.
Roboty SCARA (Selective Compliance Assembly Robot Arm): Zaprojektowane specjalnie do szybkiego montażu i obróbki. Roboty SCARA mają dwa przeguby rotacyjne w jednej płaszczyźnie, co pozwala im na szybkie i precyzyjne ruchy w płaszczyźnie horyzontalnej.
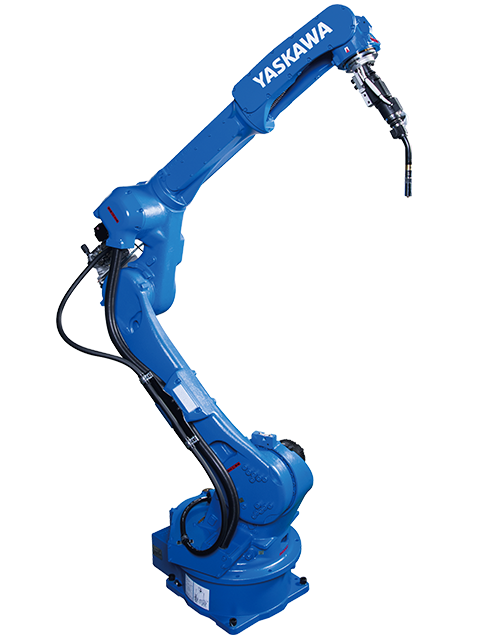
Roboty Articulated (zwrotne): Są to wszechstronne typy robotów, które najbardziej przypominają ludzką rękę. Mają dwa lub więcej przegubów rotacyjnych, co daje im duży zakres ruchów. Często wykorzystywane w zadaniach takich jak malowanie, spawanie, montaż, czy w zastosowaniach medycznych.
Roboty równoległe: Są to roboty, w których ruch jest kontrolowany przez kilka przegubów połączonych równolegle. Często używane w bardzo specyficznych zastosowaniach. Dzięki swojej zdolności do szybkiego i precyzyjnego ruchu, wykorzystywane są w symulatorach lotu.
Roboty delta (roboty równoległe): Są one specyficznym rodzajem robotów równoległych, które mają unikalną strukturę kinematyczną. Roboty delta składają się
z serii łączników równoległych, zwykle trzech, które są połączone ze wspólnym efektorem końcowym. Roboty te są znane z szybkiego i precyzyjnego ruchu i są często wykorzystywane w zastosowaniach montażowych, takich jak pakowanie.
Roboty liniowe: Są to roboty, które poruszają się tylko wzdłuż jednej osi. Zazwyczaj są prostsze w budowie i sterowaniu, ale mają ograniczone zastosowania. Często są wykorzystywane do przesuwania przedmiotów wzdłuż linii produkcyjnej.
Roboty snake-like (wężopodobne): Są to roboty, które mają wiele przegubów połączonych w taki sposób, że mogą poruszać się podobnie do węża. Te roboty są szczególnie użyteczne w środowiskach, które wymagają dużej elastyczności ruchów, takich jak operacje w trudno dostępnych miejscach.
Roboty na podwoziu kołowym, gąsienicowym, czy kroczącym: Są to roboty mobilne, które poruszają się na różnego rodzaju podwoziach. Ich konstrukcja
i zastosowanie zależy od specyfiki terenu, w którym mają się poruszać.
Roboty modułowe: Są to roboty, które składają się z wielu różnych modułów. Mogą być konfigurowane na różne sposoby w celu osiągnięcia pożądanych funkcji. Roboty te mogą być bardzo wszechstronne i są zdolne do wykonywania wielu różnych zadań.
Roboty soft (miękkie): Są to roboty, które są zbudowane z elastycznych materiałów. Umożliwia im to zmianę swojego kształtu w reakcji na różne sytuacje. Te roboty są bardzo innowacyjne i mogą mieć wiele zastosowań, od medycyny do eksploracji przestrzeni.
Wymieniona wyżej klasyfikacja robotów to ogólny podział ze względu na budowę jednostki kinematycznej. Każdy rodzaj robotów ma swoje unikalne cechy i zastosowania, a wiele robotów może łączyć elementy z różnych kategorii w celu osiągnięcia określonej funkcjonalności.
Klasyfikacja robotów ze względu na obszar ich zastosowań.
Roboty mogą być również klasyfikowane ze względu na obszar ich zastosowań. Oto niektóre z nich:
Roboty przemysłowe: Roboty używane w procesach produkcyjnych, takich jak spawanie, malowanie, montaż, pakowanie, sortowanie i transport. Mogą to być roboty kartezjańskie, przegubowe, SCARA czy równoległe, zależnie od konkretnych potrzeb.
Roboty medyczne: Roboty używane w medycynie do różnych zadań, takich jak operacje chirurgiczne (np. system da Vinci), rehabilitacja, dostarczanie leków, czy pomoc w diagnostyce. Mogą mieć formę manipulatorów, egzoszkieletów czy autonomicznych robotów mobilnych.
Roboty usługowe: Roboty przeznaczone do pomocy ludziom w codziennych czynnościach. Mogą one być używane w domach do czyszczenia, gotowania czy opieki, w sklepach do obsługi klienta, czy w hotelach do dostarczania zamówień.
Roboty edukacyjne: Są to roboty używane w edukacji, aby pomóc uczniom zrozumieć podstawy programowania, robotyki i STEM. Przykładami mogą być roboty LEGO Mindstorms czy Sphero.
Roboty wojskowe: Są to roboty używane w wojsku do zadań takich jak zwiad, neutralizacja bomb, transport czy wsparcie w boju. Przykładowe roboty to EOD UGVs, drony czy autonomiczne pojazdy.
Roboty kosmiczne: Są to roboty używane w badaniach kosmicznych. Przykładowe roboty to łaziki marsjańskie, takie jak Perseverance czy Curiosity, czy sondy kosmiczne, takie jak Voyager.
Roboty rolnicze: Są to roboty używane w rolnictwie do zadań takich jak siew, zbieranie plonów, nawożenie, czy monitorowanie upraw. Przykładowe roboty to autonomiczne ciągniki czy roboty do zbierania owoców.
Wymieniona wyżej klasyfikacja robotów przedstawia tylko niektóre z obszarów,
w których roboty są używane. Wraz z rozwojem technologii roboty są coraz bardziej wszechstronne i znajdują zastosowanie w coraz to nowych obszarach.
Rola robotów współpracujących w systemach robotyki.
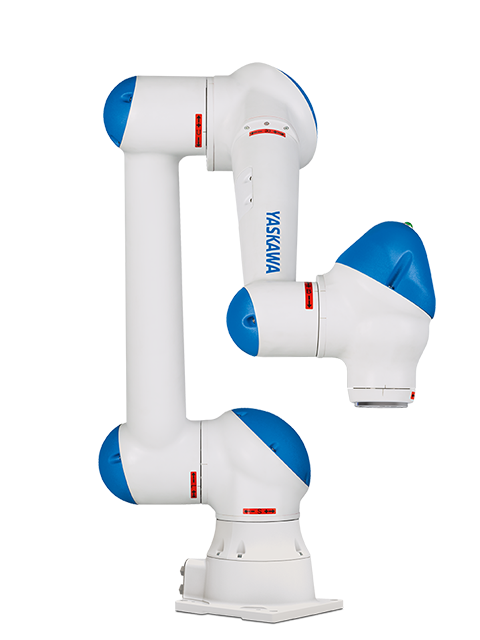
Roboty współpracujące, tzw. coboty (od ang. collaborative robots), zaczynają odgrywać ważną rolę w systemach robotyki. Cobot, to robot zaprojektowany tak, aby bezpiecznie współpracować z ludźmi w bezpośrednim środowisku pracy, co oznacza, że nie wymaga tradycyjnych barier ochronnych, które są często niezbędne dla tradycyjnych robotów przemysłowych.
Oto kilka kluczowych ról robotów współpracujących:
Współpraca z ludźmi: Coboty zaprojektowane są tak, aby współpracować z ludźmi
w sposób bezpośredni, co oznacza, że mogą współpracować w tych samych przestrzeniach bez konieczności zabezpieczania obszarów pracy.
Wspomaganie pracowników: Coboty mogą pomagać pracownikom w wykonywaniu pracy fizycznej, monotonnej lub niebezpiecznej. W ten sposób mogą zwiększyć produktywność i bezpieczeństwo pracy.
Łatwość programowania: Wiele cobotów jest nieskomplikowanych do programowania przez pracowników, nawet tych, którzy nie mają doświadczenia
w programowaniu robotów. To sprawia, że są one dostępne dla małych i średnich przedsiębiorstw, które nie mają zasobów na utrzymanie specjalistycznych programistów robotów.
Zwiększenie elastyczności produkcji: Coboty są zazwyczaj łatwe do przenoszenia
i ponownego programowania, co oznacza, że mogą one być szybko dostosowane do różnych zadań. To sprawia, że są idealnym rozwiązaniem dla elastycznych systemów produkcji, gdzie wymagane są częste zmiany.
Wsparcie dla pracowników starszych lub niepełnosprawnych: Coboty mogą pomóc w zwiększeniu dostępności miejsc pracy dla osób starszych lub niepełnosprawnych, umożliwiając im wykonywanie zadań, które mogą być dla nich trudne lub niemożliwe do wykonania bez pomocy.
Przyszłość pracy: Wraz z postępem technologicznym, coraz więcej robotów współpracujących jest w stanie wykonywać skomplikowane i wyspecjalizowane zadania. To oznacza, że mogą one odegrać kluczową rolę w kształtowaniu przyszłości pracy, pomagając ludziom skupić się na bardziej wartościowych zadaniach, podczas gdy roboty zajmą się rutynowymi lub fizycznie wymagającymi zadaniami.
Wobec powyższych informacji, warto wspomnieć o roli robotów współpracujących, które znalazły swoje miejsce w różnych sektorach gospodarki:
Produkcja: Wykonywanie zadań takich jak montaż, pakowanie, sortowanie i obsługa maszyn. Dzięki swoim zdolnościom do nauki i adaptacji, coboty są w stanie przyspieszyć procesy produkcyjne i zwiększyć wydajność.
Logistyka: W magazynach i centrach dystrybucyjnych coboty mogą wspomagać pracowników w przesuwaniu ciężkich ładunków, sortowaniu produktów i kompletowaniu zamówień.
Służba zdrowia: W szpitalach i klinikach coboty mogą pomóc w rehabilitacji pacjentów, dostarczaniu leków, a nawet w przeprowadzaniu skomplikowanych operacji chirurgicznych z precyzją niemożliwą do osiągnięcia przez człowieka.
Gastronomia i hotelarstwo: Pomoc w obsłudze klienta, przygotowywaniu posiłków, serwowaniu jedzenia, a nawet sprzątania po gościach.
Rolnictwo: Automatyczne zbieranie plonów, monitorowanie upraw i zwierząt, a także przeprowadzanie analiz i badań naukowych.
Edukacja: Coboty mogą służyć jako narzędzia do nauki dla studentów studiujących robotykę, inżynierię, informatykę i inne pokrewne dziedziny.
Oprócz powyższych, roboty współpracujące mają ogromny potencjał do wprowadzenia postępu w wielu innych sektorach gospodarki. W miarę rozwoju technologii, z pewnością zobaczymy coraz więcej zastosowań dla tych elastycznych
i wszechstronnych maszyn.