
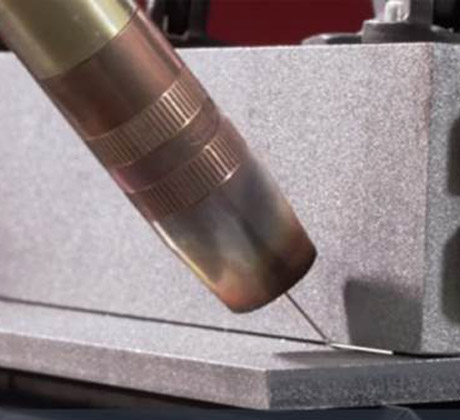
TouchSense


Dzięki TouchSense możliwa jest do określenia dokładna pozycja elementu przed rozpoczęciem procesu spawania spoin pachwinowych i spoin doczołowych. Określenie pozycji startowej i końcowej następuje na podstawie kontroli elementu spawanego za pomocą drutu lub dyszy gazowej. Po przekazaniu sygnałów do robota może on obliczyć dokładną ścieżkę spoiny.