

Coordinated Motion
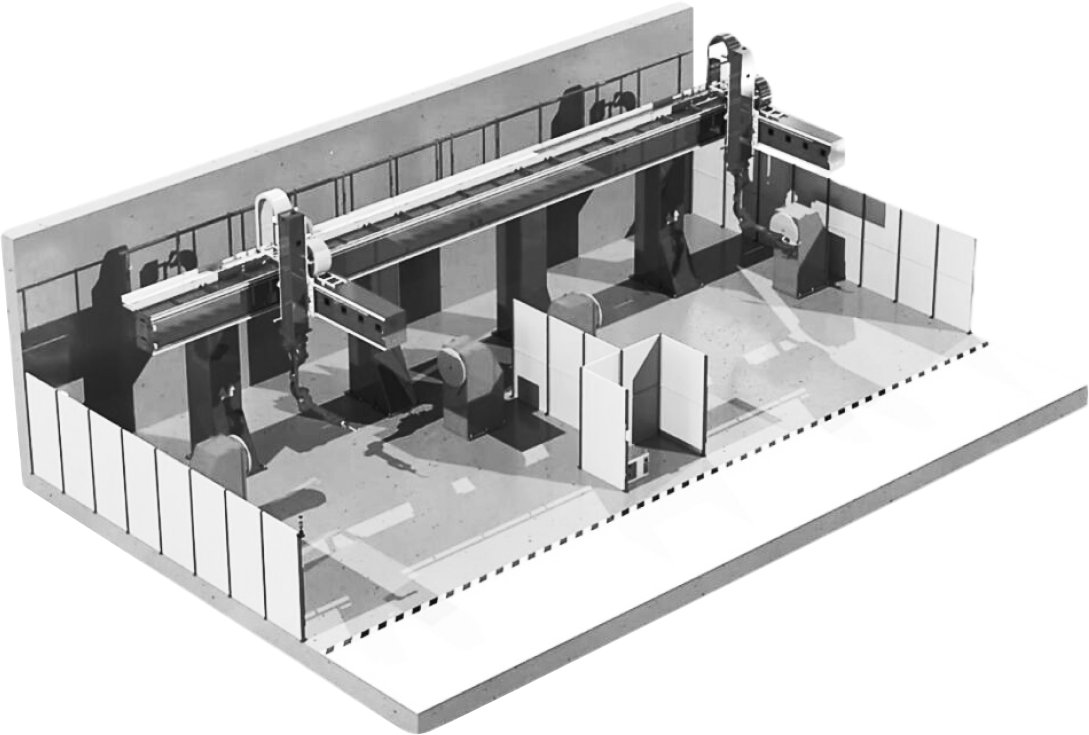
W przypadku tego systemu mamy również możliwość pracy w tak zwanym trybie „jigless”, który to pozwala, aby w przypadku pracy dwóch robotów jeden z nich utrzymywał pozycje przedmiotu, natomiast drugi obrabiał detal.
W przypadku ruchu skoordynowanego jednego lub dwóch robotów z pozycjonerem należy pamiętać, że wszystkie ścieżki należy wcześniej nauczyć. Praca skoordynowana jest dostępna w tak zwanej skoordynowanej interpolacji, w której to wykonywana jest interpolacja względna pomiędzy stacją i robotem. Odpowiednio „master” oraz „slave”, czyli jeden z komponentów narzuca ruch, a drugi za nim podąża.
Zalety
- Możliwość współpracy stacji wraz z robotem.
- Możliwość współpracy dwóch robotów.
- Możliwość bezstykowego spawania dwóch robotów jednocześnie.